
Mr. Crokes robotic level one assignment.


- We needed to make a robot that could climb an inclined path of 90 degrees.
2. Before we built the robot we needed to know how to make it keep traction on the ramp and how we should add power so it could climb a 90 degree vertical incline.
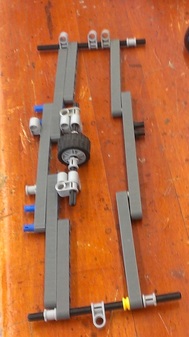
3. For our first prototype we used a robot with two large powered wheels in the back, with gears to increase torque, propelling the robot with two smaller wheels in the front. However, The robot would fall backwards when the incline got too steep. To rectify this problem, we used a system that had two wheels on the other side of the ramp, thus keeping the robot secured to the ramp.
4. The final product is a robot that can climb up a 90 degree angle successfully and efficiently.
5. We received feedback from another group suggesting the system that secured the robot with wheels on the other side of the ramp, which we used successfully.
6. I learned how to think outside of the box to solve the problem of climing up a 90 degree angle.
7. If i were to do this project again, I would have used 2 systems of wheels on the other side of the ramp to secure the robot to decrease the gears slipping.
RACING BOT THE MOVIE
| a_step_by_step_guide_to_the_engineering_design_process.ppt |
